Autonomous Cell Culture Robotic System
C++, Python, ROS2, YOLO, OpenCV, React, Java, React, SpringBoot, MySQL, UART, ATMega2560
Author: Allen Liu
The goal of this project is to build a robotic system to automate the process of the cell culture. The robotic system a gantry robot to perform the liquid and flask handling, flask platform to hold and manuver the flasks, a custom-built microscope to validate the cell organism as well as a web application for user-interaction and teleoperation.
Architecture
This system can be split into four parts:
- Robotic Control software using
ROS2 IrononNvidia Jetson Orin Nano - Motor control embedded software using embedded
C++ - A 3-tier web application using
React.js,Java Spring-BootandMySQL - Micrroscope Controller software
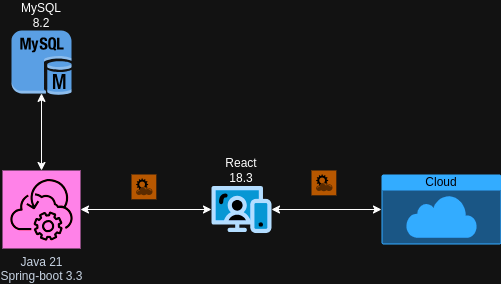
The overall software architecture is shown in the diagram below:
In this system the robotic software and web application will be communicated via HTTP protocol that web application can send command to the robotic software while robotic software will stream the live status of the robot to the web and display it to the user. On the cloud side, the cell image will be taken from the microscope control software and upload it to cloud while cloud will perform the analysis using AI and send the result and image to the web.
Robotic Control Software Architecture
The robotic software is intregated over ROS2 Iron platform to ensure seamless communication between processes. The ROS2 platform is using Fast DDS to implement the Inter-Process Communication (IPC), that all process can be easily communicate with each other as long as they are on the same subnet.
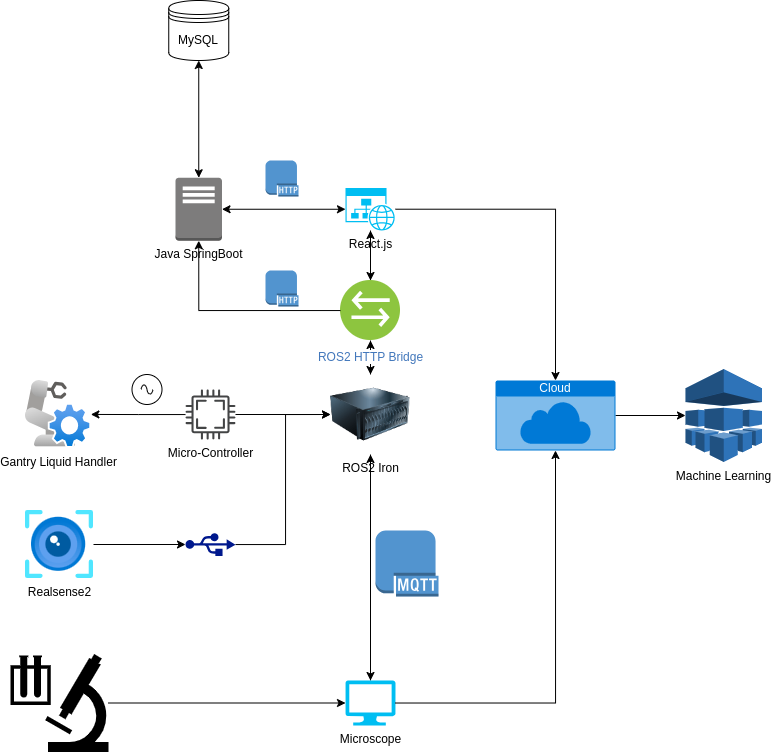
The architecture of the Robotic control software is shown in the diagram below:
The entire software consists of 10 packages:
dynamixel_control: Package to control the dynamixel motor on flask and pump operation.- Communicates with the
dynamixelmotors viaRS485
- Communicates with the
festo_control: Package to control the festo pump to dispense and aspirate liquid.gantry_control: Package to do the motion control of the gantry robot.- Communicates with the microcontroller via serial port.
gantry_interfaces: Custom interfaces for transporting data between processes.microscope_control: Control the actions of the microscope.- Communicate with microscope via
MQTT 2.0
- Communicate with microscope via
protocol_executer: Execute the high-level protocols of the robot system.- Handles the external request over
HTTP 1.0
- Handles the external request over
robot_control: Launch all controller of the robot.robot_vision: Perform the computer vision calculation of the robot.YOLOv8object detection model to detect flaskYOLOv8object detection model to classify cell- Segment the cells using
OpenCV
robot_viz: Visualize the robot system.
Web Application Architecture
The web application is a 3-tier software architectutre with Presentation layer written in React.js, application layer written by Java 21 using Spring-Boot 3.0 framework and a storage layer using MySQL.
The software architecture of the Web Application is shown in the figure below: