Pick and Place with Ridheback-Sawyer-PX100 Robot
ROS1, ROS Noetic, Linux, Bash Shell, C++, Python, Moveit!, Navigation, Rethink Sawyer Robot Arm, Interbotix PincherX-100 Robot Arm, Clearpath Ridgeback Mobile Platform
Description
This project aims for implementing a pick-and-place pipline on a mobile manipulator via ROS Noetic, which is a Clearpath Ridgeback Mobile Platform with Rethink Sawyer Robot Arm and Interbotix PincherX-100 Robot Arm mounted on top of it.

Structure
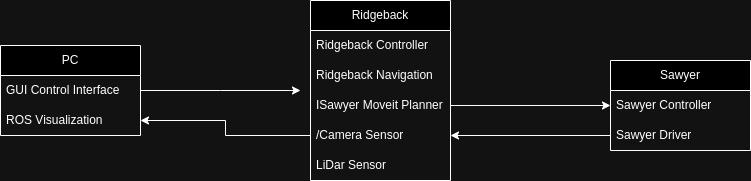
The overall detailed structure of the syste, is shown in the figure below, which can be divided into 3 subsystems.
Robot Arm Control: Used for controlling the motion of theSawyerrobot arm given a goal pose commandMobile Platform Control: Used for controlling the motion of theRidgebackmobile platform.Command Interface: Retriving the goal from user, and parsing it into the command given to the arm and base controller, so it will move to the goal as intended.
Software
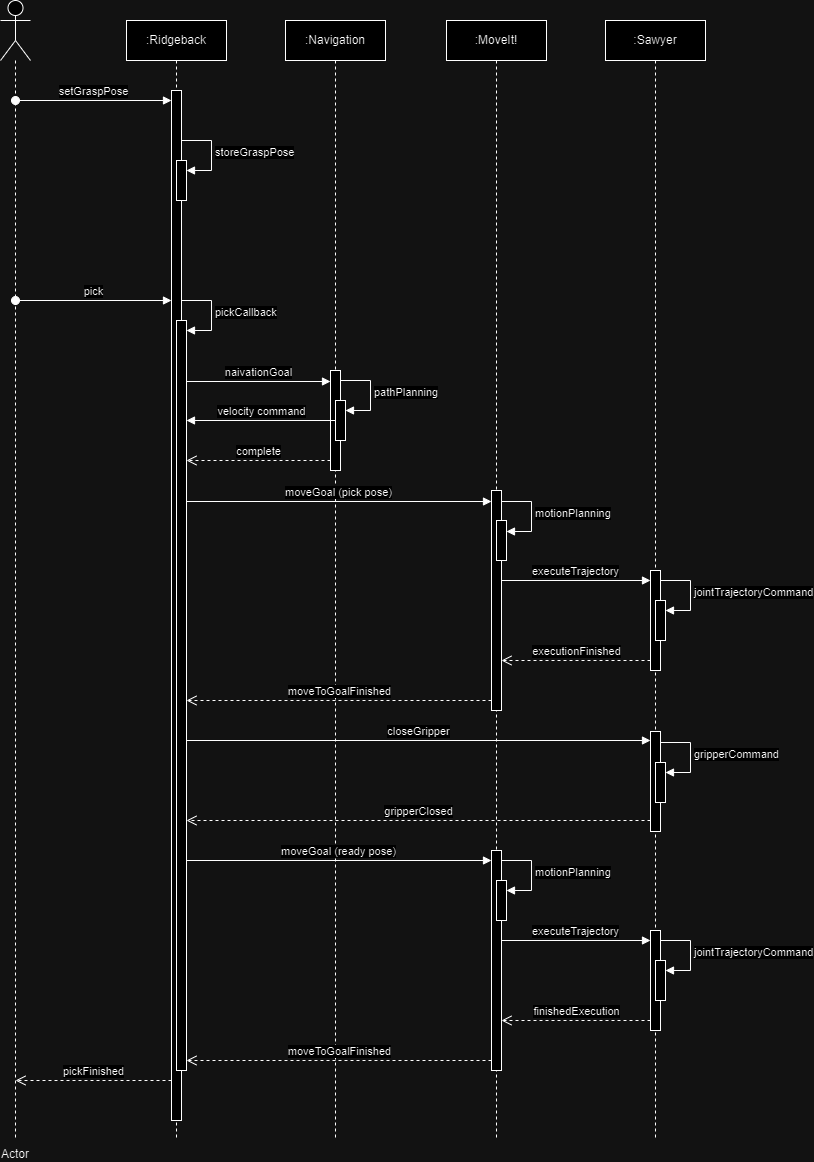
Pick
On Pick, user will first select the target to pick and then the ridgeback will move to the target pose and sawyer will pick up the target.
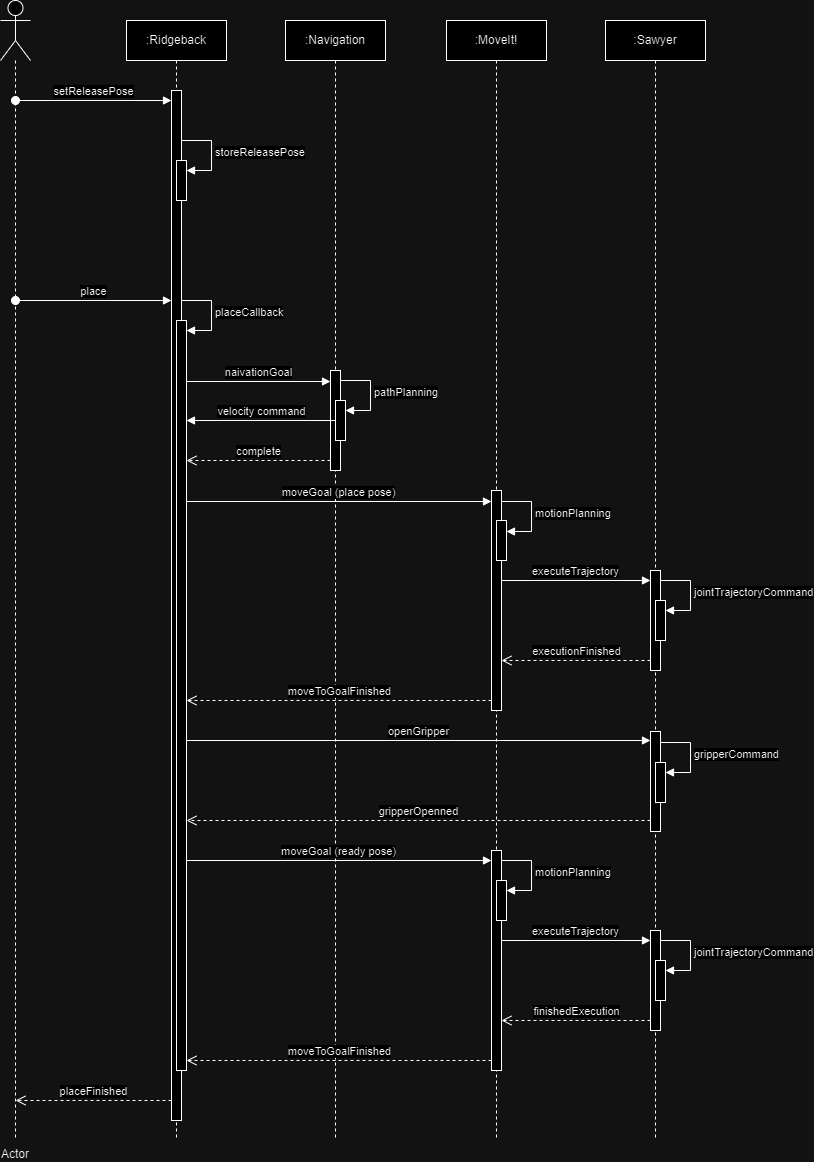
Place
Hardware
The overall hardware structure is shown in the figure below, which is a sawyer arm and a px100 arm with a realsense cammera attached mounted on the top of the ridgeback.
Network
The network configureation of the overall system is shown in the figure below
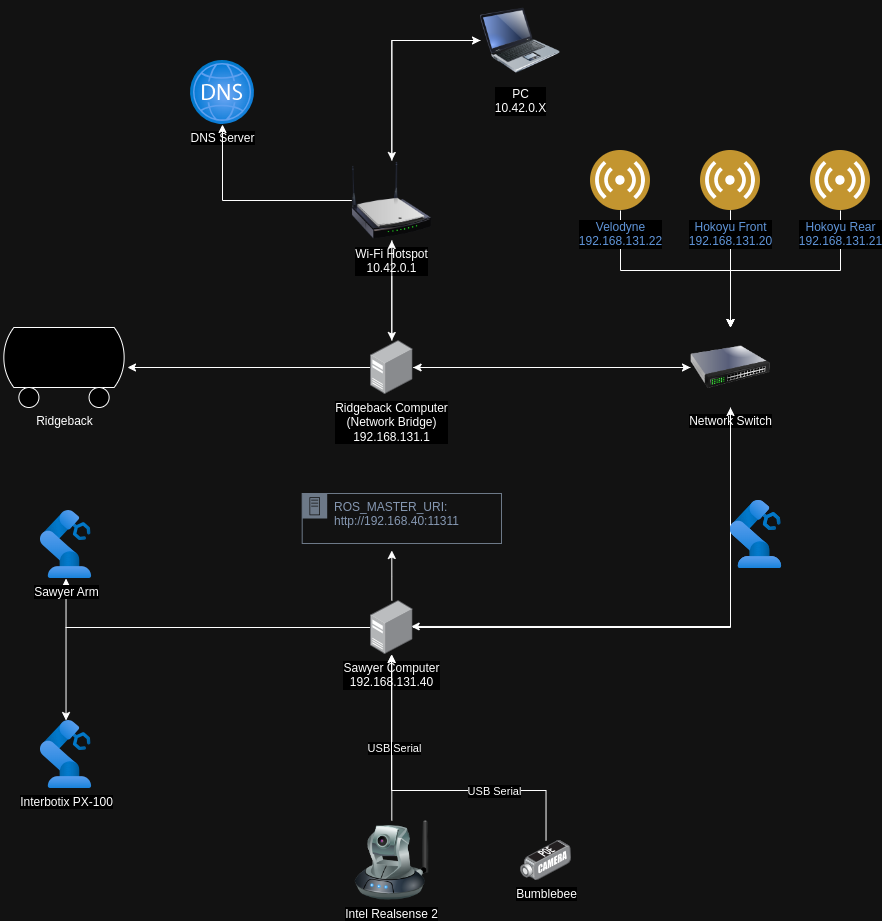
This system consists of 3 main machine:
PC: The user control interface for user to send the command to the system.Ridgeback Computer: Used for perform all calculations given command sent from user and control the motion of the platform.Sawyer Computer: Used for control the motion of the sawyer arm given the command from ridgeback computer.
ROS
Based on the ROS1 standard, in order for all nodes to be discovered by others, the ROS_MASTER_URI must be set to be the same, so that all nodes are running under the same ROS master. So that all parameters and topics are served on the same server so that they can listen to others.
Packages
motion_control: Used theROS Navigationto control the motion of the mobile platform.arm_control: ontrol the motion of the robot arm.vision_control: Calibrate the camera and control the motion of thepx100arm.object_detection: Used for detect target pose as for the target object.picker_interfaces: Customized interfaces for transporting data betweenROSnodesmanipulator_description: Visualizing the robot overrviz.
Final Result
Technical Challenges
Moveit! with Sawyer
The default Moveit! interface configuration for sawyer was not compatible with the current configuration of the robot since the robot arm is mounted on the base instead of mounting on the control algorith coming along with the software.
Sawyer Hardware
There was a lot of issue setting up the Rethink Sawyer robot arm, there was some both mechanical and software issue for fixing it.
Link: Fixing Sawyer Arm
Low Bandwidth
The robot is configured to use a 2G wifi to communicate with the laptop, making it difficult to transport large amount of data within short period of time. Which increases the latency between sensor and when data is processed. This will cause inacuracy on SLAM, path planning and motion planning.